Current Projects
Autonomous Underwater Vehicle
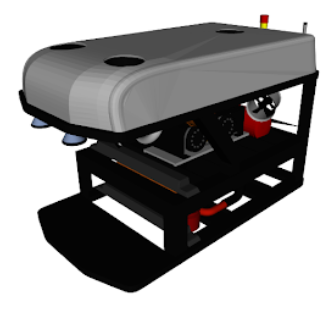
The Autonomous Underwater Vehicle (AUV) group has been part of Professor Norris’ AUVSL since it was established in 2018. The group consists of two graduate students (Rodra and Sharan) and three undergraduate students (Carlos, Justin, and Adam). Our primary project is exploring the use of Kalman filters in order to improve underwater navigation in UUVSim, an open source underwater vehicle simulator. Eventually, we aim to implement our work on a physical system. Our work is supported by a grant from Schilling Robotics, a subsidiary of TechnipFMC.
Members:
Sharan Balu || Rodra Hascaryo || Adam Rosales || Carlos Villanueva || Justin Yurkanin
Members:
Sharan Balu || Rodra Hascaryo || Adam Rosales || Carlos Villanueva || Justin Yurkanin
Code Generation
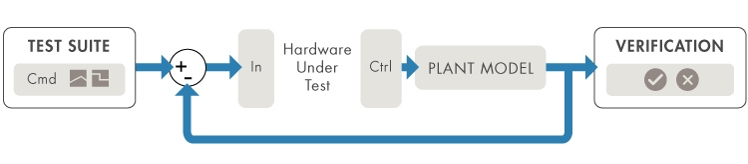
An autocode generator used to convert a Simulink control system diagram to C/C++ code for ROS. It will allow for Hardware In the Loop testing and simulation to evaluate hardware performance as well as rapid prototyping.
Members:
Maxwel Cichon
Members:
Maxwel Cichon

Ad Hoc Mesh Network, Localization Engine
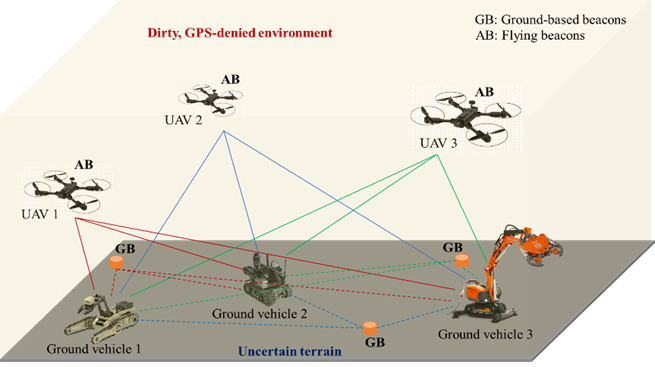
This project is intended for use in GPS-denied environments. By using Decawave DM1000 UWB beacons in combination with IMU and wheel encoders in robots, localization will move beyond the “anchor” and “tag” method of the manufacturer. There is potential for swarm localization by chaining localization observations vehicle to vehicle.
Members:
James Keiller
Members:
James Keiller
UAV Based Terrain Identification
Sensor fusion of LIDAR, RGB cameras, and IR cameras to identify unique terrain features. The UAVs will carry Ultra-wideband (UWB) beacons for future localization research.
Dead Reckoning and Visual Odometry
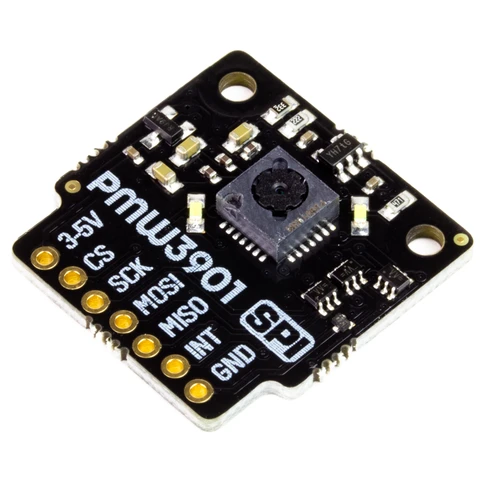
Robot motion can be recovered based on the pixel intensity changes in the surrounding environment. No high-level information is needed from the image, and minimal energy for computation is required from the robot. This can be used to estimate slippage on a ground vehicle or to sense 3D motion.
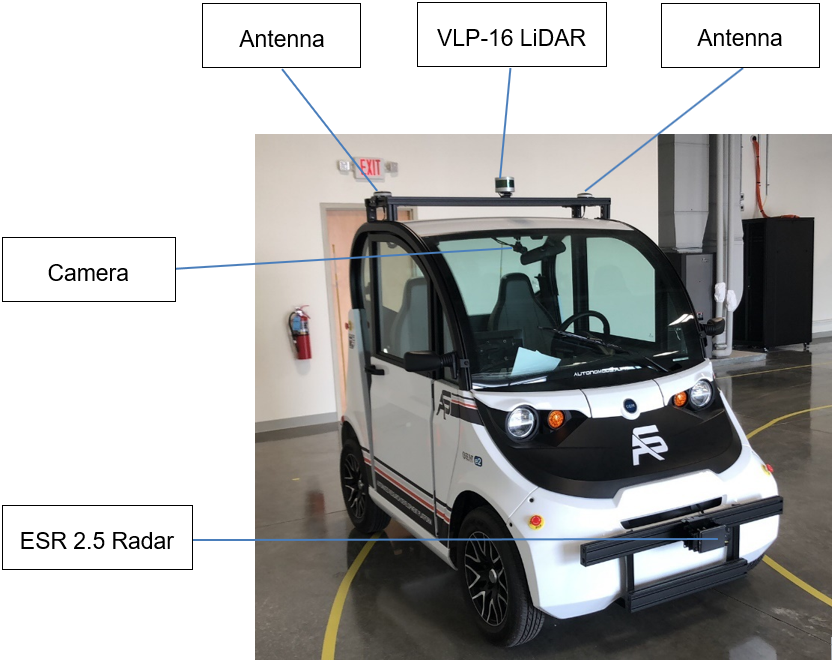
Automated Parking
Algorithms to safely and autonomously park a vehicle can be tested on the instrumented Polaris Gem platform.

Human-in-the-Loop (HIL) Adaptive Personalized Control
For drive-by-wire, rapid prototyping, semiautonomy, or tele-operation applications, HIL APC will take advantage of the perception capabilities of an equipped platform to better enable the operator to perform the intended actions.

Cooperation with HDCL and DRES
The lab is actively collaborating with Professor Liz Hsiao-Wecksler and the Human Dynamics and Controls Lab HDCL), as well as the Division of Disability Resources and Educational Services (DRES) to conduct interdisciplinary research. We are working on medical devices to improve wheelchair users' well-being.
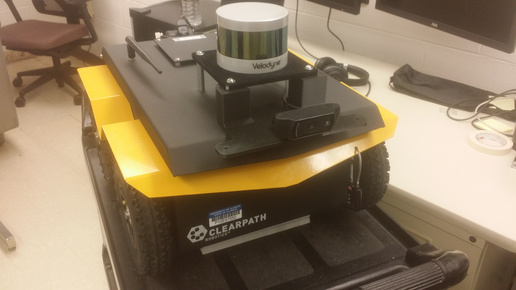
CERL Autonomous Construction Project
Autonomous waypoint navigation
ROS Controller Auto-coding from Simulink
Environment mapping with LIDAR and Stereo Camera sensor fusion
Vehicle dynamics and environmental modeling with spatialV2 toolbox in MATLAB
System Identification to improve and verify vehicle dynamics simulation..
ROS Controller Auto-coding from Simulink
Environment mapping with LIDAR and Stereo Camera sensor fusion
Vehicle dynamics and environmental modeling with spatialV2 toolbox in MATLAB
System Identification to improve and verify vehicle dynamics simulation..
Contact AUVSL
Professor William R. (Bob) Norris
Department of Industrial and Enterprise Systems Engineering
University of Illinois at Urbana-Champaign
210B Transportation Building
104 S. Mathews Ave.
Urbana, IL 61801-3080
(217) 300-6647
Email: wrnorris@Illinois.edu
Professor William R. (Bob) Norris
Department of Industrial and Enterprise Systems Engineering
University of Illinois at Urbana-Champaign
210B Transportation Building
104 S. Mathews Ave.
Urbana, IL 61801-3080
(217) 300-6647
Email: wrnorris@Illinois.edu
Copyright © Autonomous Unmanned Systems Laboratory 2022